In Evaluate and compare colormaps, I have shown how to extract and display the lightness profile of a colormap using Python. I do this routinely with colormaps, but I realize it takes an effort, and not all users may feel comfortable using code to test whether a colormap is perceptual or not.
This got me thinking that there is perhaps a need for a user-friendly, interactive tool to help identify colormap artifacts, and wondering how it would look like.
In a previous post, Comparing color palettes, I plotted the elevation for the South American continent from the Global Land One-km Base Elevation Project using four different color palettes. In Figure 1 below I plot again 3 of those: rainbow, linear lightness rainbow, and grayscale, respectively, from left to right. In maps like these some artifacts are very evident. For example there’s a classic film negative effect in the map on the left, where the Guiana Highlands and the Brazilian Highlands, both in blue, seem to stand lower than the Amazon basin, in violet. This is due to the much lower lightness (or alternatively intensity) of the colour blue compared to the violet.
Figure 1
However, other artifacts are more subtle, like the inversion of the highest peaks in the Andes, which are coloured in red, relative to their surroundings, in particular the Altipiano, an endorheic basin that includes Lake Titicaca.
My idea for this tool is simple, and consists of two windows. The first is a basemap window which can display either a demo dataset or user data loaded from an ASCII grid file. In this window the user would interactively select a profile by building a polyline with point-and-click, like the one in Figure 2 in white.
Figure 2
The second window would show the elevation profile with the colour fill assigned based on the colormap, like in Figure 3 at the bottom (with colormap to the right), and with a profile of the corresponding colour intensities (on a scale 1-255) at the top.
In this view it is immediately evident that, for example, the two highest peaks near the center, coloured in red, are relative intensity lows. Another anomaly is the absolute intensity low on the right side, corresponding to the colour blue, where the elevation profile varies smoothly.
Figure 3
I created this concept prototype using a combination of Matlab, Python, and Surfer. I welcome suggestions for possible additional features, and would like to hear form folks interested in collaboration on a web app (ideally in Python).
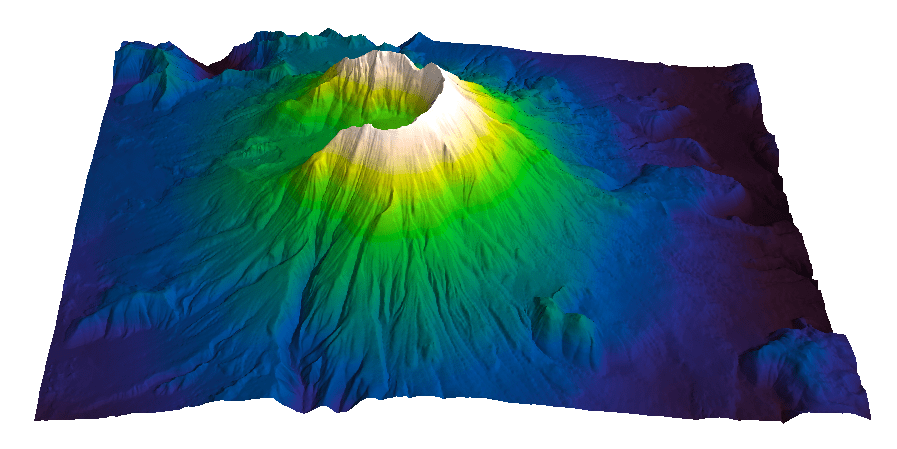
Evan Bianco of Agile Geoscience wrote a wonderful post on how to use python to import, manipulate, and display digital elevation data for Mt St Helens before and after the infamous 1980 eruption. He also calculated the difference between the two surfaces to calculate the volume that was lost because of the eruption to further showcase Python’s capabilities. I encourage readers to go through the extended version of the exercise by downloading his iPython Notebook and the two data files here and here.
I particularly like Evan’s final visualization (consisting of stacked before eruption, difference, and after eruption surfaces) which he created in Mayavi, a 3D data visualization module for Python. So much so that I am going to piggy back on his work, and show how to import a custom palette in Mayavi, and use it to color one of the surfaces.
Python Code
This first code block imports the linear Lightness palette. Please refer to my last post for instructions on where to download the file from.
import numpy as np
# load 256 RGB triplets in 0-1 range:
LinL = np.loadtxt('Linear_L_0-1.txt')
# create r, g, and b 1D arrays:
r=LinL[:,0]
g=LinL[:,1]
b=LinL[:,2]
# create R,G,B, and ALPHA 256*4 array in 0-255 range:
r255=np.array([floor(255*x) for x in r],dtype=np.int)
g255=np.array([floor(255*x) for x in g],dtype=np.int)
b255=np.array([floor(255*x) for x in b],dtype=np.int)
a255=np.ones((256), dtype=np.int); a255 *= 255;
RGBA255=zip(r255,g255,b255,a255)
This code block imports the palette into Mayavi and uses it to color the Mt St Helens after the eruption surface. You will need to have run part of Evan’s code to get the data.
from mayavi import mlab
# create a figure with white background
mlab.figure(bgcolor=(1, 1, 1))
# create surface and passes it to variable surf
surf=mlab.surf(after, warp_scale=0.2)
# import palette
surf.module_manager.scalar_lut_manager.lut.table = RGBA255
# push updates to the figure
mlab.draw()
mlab.show()
In my last post I introduced a CIE Lab linear L* rainbow palette from a paper by Kindlmann et al. [1]. I used this palette with a map of South America created with data from the Global Land One-km Base Elevation Project at the National Geophysical Data Center. The map is the third one in the figure below.
Based on visual inspection I argued that linear L* colored map compares more favourably with the grayscale – my perceptual benchmark – on the right – than the first and second, which use my ROYGBIV rainbow palette (from this post) and a classic rainbow palette, respectively. I noted that looking at the intensity of the colorbars may help in the assessment: the third and fourth colorbars are very similar and both look perceptually linear, whereas the first and second do not.
So it seems that among the three color palettes the third ones is the best, but…..
… prove it!
All the above is fine and reasonable, and yet it is still very much subjective. How can I prove it, convince myself this is indeed the case?
Well, of course one way is to use my L* profile and Great Pyramid tests with Matlab code from the first post of this series. Look at the two figures below: comparison of the lightness L* plots clearly shows the linear L* palette is far more perceptual than the ROYGBIV.
One disadvantage of this method is that you have to use Matlab, which is neither free nor cheap, and have to be comfortable with some code and ASCII file manipulation.
Just recently I had an idea for an open source alternative with ImageJ and the 3D color inspector plugin. The only preparatory step required is to save a palette colorbar as a raster image. Then open the image in ImageJ, run the plugin and display the colorbar in Lab space in a 3D view. There are many options to change the scale of the plot, the perspective, and how the colors are displayed (e.g. frequency weighted, median cut, etcetera). The view can be rotated manually, and also automatically. Below I am showing the rotating animations for the same two palettes.
Discussion
The whole process, including the recording of the animations using the Quicktime screencast feature, took me less than 10 minutes, and it leaves no doubt as to which one is the best color palette. Let me know what you think.
A few observations: in 3D the ROYGBIV palette is even more strikingly and obviously non-monotonic. The lightness gradient varies in magnitude, resulting in non-uniform contrast. Compare for example the portion between blue and green to that between green and yellow: these have approximately the same number of samples but very different change in lightness value between the extremes. The gradient sign also changes, producing perceptual inversions, for example with the yellow to red section following the blue to yellow. These inversions may result in perceived elevation inversions, for example, if using this palette to display elevation data. On the other hand, the linear L* palette nicely spirals upwards with L* changing monotonically from 0 to 100.
After my previous post in this series there was a great discussion on perceptual color palettes with some members of the Worldwide Geophysicists group on LinkedIn. Ian MacLeod shared some really good examples, and uploaded it in here.
HSL linear L rainbow palette
Today I’d like to share a color palette that I really like:
It is one of the palettes introduced in a paper by Kindlmann et al. [1]. The authors created their palettes with a technique they call luminance controlled interpolation. They explain it in this online presentation. However they used different palettes (their isoluminant rainbow, and their heated body) so if you find it confusing I recommend you look at the paper first. Indeed, this is a good read if you are interested in colormap generation techniques; it is one of the papers that encouraged me to develop the methodology for my cube law rainbow, which I will introduce in an upcoming post.
This is how I understand their method to create the palette: they mapped six pure-hue rainbow colors (magenta, blue, cyan, green, yellow, and red) in HSL space, and adjusted the Luminance by changing the HSL Lightness value to ‘match’ that of six control points evenly spaced along the gray scale palette. After that, they interpolated linearly along the L axis between 0 and 1 using the equation presented in the paper.
CIE Lab linear L* rainbow palette
For this post I will try to create a similar palette. In fact, initially I was thinking of just replicating it, so I imported the palette as a screen capture image into Matlab, reduced it to a 256×3 RGB colormap matrix, and converted RGB values to Lab to check its linearity in lightness. Below I am showing the lightness profile, colored by value of L*, and the Great Pyramid of Giza – my usual test surface – also colored by L* (notice I changed the X axis of both L* plots from sample number to Pyramid elevation to facilitate comparison of the two figures).
Clearly, although the original palette was constructed to be perceptually linear, it is not linear following my import. Notice in particular the notch in the profile in the blue area, at approximately 100 m elevation. This artifact is also visible as a flat-looking blue band in the pyramid.
I have to confess I am not too sure why the palette has this peculiar lightness profile. I suspect this may be because their palette is by construction device dependent (see the paper) so that when I took the screen capture on my monitor I introduced the artifacts.
The only way to know for sure would be to use their software to create the palette, or alternatively write the equation from the paper into Matlab code and create a palette calibrated on my monitor, then compare it to the screen captured one. Perhaps one day I will find the time to do it but having developed my own method to create a perceptual palette my interest in this one became just practical: I wanted to get on with it and use it.
Fixing and testing the palette
Regardless of what the cause might be for this nonlinear L* profile, I decide to fix it and I did it by simply replacing the original profile with a new one, linearly changing between 0.0 and 1.0. Below I am showing the L* plot for this adjusted palette, and the Great Pyramid of Giza, both again colored by value of L*.
The pyramid with the adjusted palette seems better: the blue band is gone, and it looks great. I am ready to try it on a more complex surface. For that I have chosen the digital elevation data for South America available online through the Global Land One-km Base Elevation Project at the National Geophysical Data Center. To load and display the data in Matlab I used the first code snippet in Steve Eddin’s post on the US continental divide (modified for South America data tiles). Below is the data mapped using the adjusted palette. I really like the result: it’s smooth and it looks right.
But how do I know, really? I mean, once I move away from my perfectly flat pyramid surface, how do I know what to expect, or not expect? In other words, how would I know if an edge I see on the map above is an artifact, or worse, that the palette is not obscuring real edges?
In some cases the answer is simple. Let’s take a look at the four versions of the map in my last figure. The first on the left was generated using th ROYGBIV palette I described in this post. It would be obvious to me, even if I never looked at the L* profile, that the blue areas are darker than the purple areas, giving the map a sort of inverted image look.
But how about the second map from the left? For this I used the default rainbow from a popular mapping program. This does not look too bad at first sight. Yes, the yellow is perceived as a bright, sharp edge, and we now know why that is, but other than that it would be hard to tell if there are artifacts. After a second look the whole area away from the Andes is a bit too uniform.
A good way to assess these maps is to use grayscale, which we know is a good perceptual option, as a benchmark. This is the last map on the right. The third map of South America was coloured using my adjusted linear L* palette. This maps looks more similar to our grayscale benchmark. Comparison of the colorbars will also help: the third and fourth are very similar and both look perceptually linear, whereas the third does show flatness in the blue and green areas.
Let me know what you think of these examples. And as usual, you are welcome to use the palette in your work. You can download it here.
UPDATE
With my following post, Comparing color palettes, I introduced my new method to compare palettes with ImageJ and the 3D color inspector plugin. Here below are the recorded 3D animations of the initial and adjusted palettes respectively. In 3D it is easier to see there is an area of flat L* between the dark purple and dark blue in the initial color palette. The adjusted color palette instead monotonically spirals upwards.

















{kind=link}