I was curious to see how all these colormaps fared, but my expectation was that Jet would sink to the bottom. I was really surprised to see it came on top, one vote ahead of the linear lightness rainbow (21 and 20 votes out of 62, respectively). The modified heated body followed with 11 votes.
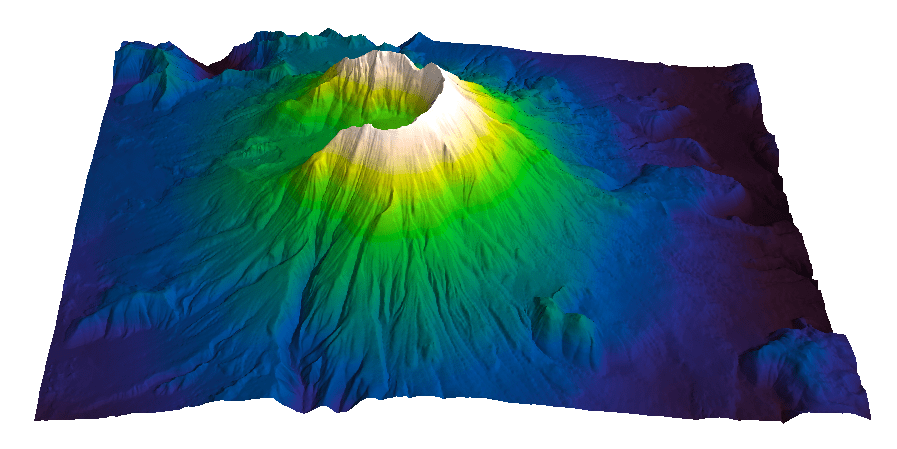
My surprise comes from the fact that Jet carries perceptual artifacts within the progression of colours (see for example this post). One way to demonstrate these artifacts is to convert the 2D map into a 3D surface where again we use Jet to colour amplitude values, but we use the intensities from the 2D map for the elevation. This can be done for example using the Interactive 3D Surface Plot plugin for ImageJ (as in my previous post Lending you a hand with image processing – introduction to ImageJ). The resulting surface is shown in Figure 1. This is almost exactly what your brain would do when you look at the 2D map colored with Jet in the previous post.
Figure 1
In Figure 2 the same data is now displayed as a surface where amplitude values were used for the elevation, with a very light sun shading to help a bit with the perception of relief, but no colormap at all. to When comparing Figure 1 with Figure 2 one of the artifacts is immediately recognized: the highest values in Figure 2, which honours the data, become a relative low in Figure 1. This is because red has lower intensity than yellow and therefore data colored in red in 2D are plotted at a lower elevation than data colored in yellow, even though the amplitudes of the latter were lowest.
Figure 2
For these reasons, I did not expect Jet to be the top pick. On the other hand, I think Jet is perhaps favoured because with consistent use, our brain, learns in part to accommodate for these non-perceptual artifacts in 2D maps, and because it has at least two regions of higher contrast (higher magnitude gradient) than other colormaps. Unfortunately, as I wrote in a recently published tutorial, these regions are randomly placed in the colormap, and the gradients are variable, so we gain on contrast but lose on faithfulness in representing the data structure.
Matt Hall wrote a great comment following the previous post, really making an argument for switching between multiple colormaps in the interpretation stage to explore and highlight features in both the signal and the noise in the data, and that perhaps no single colormap is best overall. I agree 100% on almost everything Matt said, except perhaps on the best overall: looking at the 2D maps, at least with this dataset, I feel the heated body could be the best overall colormap, even if marginally. In Figure 3, Figure 4, Figure 5, and Figure 6 I show the 3D displays obtained by converting the 2D grayscale, linear lightness rainbow, modified heated body, and cube llightness rainbow, respectively. Looking at the 3D displays altogether gives me a confirmation of that feeling.
Since then Giuliano has been kind enough to provide me with the data for one of his spectrograms, so I am resuming the discussion. Below here is a set of 5 figures generated in Matlab from the same data using different colormaps. With this post I’d like to get readers involved and ask to cast your vote for the colormap you prefer, and even drop a line in the comments section to tell us the reason for your preference.
In the second post I’ll show the data displayed with the same 5 colormaps but using a different type of visualization, which will reveal what our brain is doing with the colours (without our full knowledge and consent), and then I will ask again to vote for your favourite.
Evan Bianco of Agile Geoscience wrote a wonderful post on how to use python to import, manipulate, and display digital elevation data for Mt St Helens before and after the infamous 1980 eruption. He also calculated the difference between the two surfaces to calculate the volume that was lost because of the eruption to further showcase Python’s capabilities. I encourage readers to go through the extended version of the exercise by downloading his iPython Notebook and the two data files here and here.
I particularly like Evan’s final visualization (consisting of stacked before eruption, difference, and after eruption surfaces) which he created in Mayavi, a 3D data visualization module for Python. So much so that I am going to piggy back on his work, and show how to import a custom palette in Mayavi, and use it to color one of the surfaces.
Python Code
This first code block imports the linear Lightness palette. Please refer to my last post for instructions on where to download the file from.
import numpy as np
# load 256 RGB triplets in 0-1 range:
LinL = np.loadtxt('Linear_L_0-1.txt')
# create r, g, and b 1D arrays:
r=LinL[:,0]
g=LinL[:,1]
b=LinL[:,2]
# create R,G,B, and ALPHA 256*4 array in 0-255 range:
r255=np.array([floor(255*x) for x in r],dtype=np.int)
g255=np.array([floor(255*x) for x in g],dtype=np.int)
b255=np.array([floor(255*x) for x in b],dtype=np.int)
a255=np.ones((256), dtype=np.int); a255 *= 255;
RGBA255=zip(r255,g255,b255,a255)
This code block imports the palette into Mayavi and uses it to color the Mt St Helens after the eruption surface. You will need to have run part of Evan’s code to get the data.
from mayavi import mlab
# create a figure with white background
mlab.figure(bgcolor=(1, 1, 1))
# create surface and passes it to variable surf
surf=mlab.surf(after, warp_scale=0.2)
# import palette
surf.module_manager.scalar_lut_manager.lut.table = RGBA255
# push updates to the figure
mlab.draw()
mlab.show()
A couple of years ago I stumbled in a great 2001 paper by Beyer [1] on The Leading Edge. Being interested in visualization techniques I was drawn by the display in Figure 1 (which is a low resolution copy from Figure 2 in the paper). But what really amazed me was the suggestion that a display like this could be created in a few minutes, without doing any interpretation, by just manipulating instantaneous phase slices. With the only condition of having data of fair quality, this promised to be an awesome reconnaissance tool.
Figure 1 – Copyright SEG
The theory
The idea that instantaneous phase is a great attribute for interpretation has been around for a long time. There is, for example, a 1989 Exploration Geophysics paper by Duff and Mason [2]. These two authors argue that amplitude time slices are a suboptimal choice, and that instantaneous phase slices should be preferred. They give three reasons:
1) on amplitude time slices only relatively strong events remain above the bias level after gain and scaling. Weak events are submerged below the bias and remain unmappable. Although it is the topic of a future post, it is worth mentioning I think this effect is exacerbated by the common but unfortunate choice of a divergent color palette with white in the middle. White is so bright (I call it white hole) that even more low amplitude events become indiscernible.
2) discrete boundaries corresponding to unique positions on the wavelet are displayed on instantaneous phase slices – this intra wavelet detail is lost on amplitude slices.
Figure 2 – after Duff and Mason, Figure 2
3) instantaneous time slices give DIRECTLY the sense of time dip for dipping events. In Figure 2 I show 2 parallel dipping reflectors, represented by 5 (non consecutive) traces, and 2 (non-consecutive) instantaneous phase slices (at arbitrary t1 an t2). I marked 5 discrete phase events for the top dipping reflector. The sense of time dip is given (with appropriate color palette) by the sense of color transition. Conversely, this intra wavelet detail would be lost on the amplitude time slices, with amplitudes between the black center trace and the red traces, and amplitudes between the red traces and the green traces lost within a single broad zone. The difference is probably not as dramatic nowadays with the increase in dynamic ranges available, but using instantaneous phase slices still remains advantageous for detailed mapping.
Beyer’s seismic terrain is just a natural extension of the instantaneous time slice as ( quoted from [1]):”… it then follows that the instantaneous phase (-180 deg to +180 deg) can simply be rescaled to the wavelength in ms of pseudoseismic two-way time… Seismic terrain can be thought of as a type of instantaneous wavelength generated from instantaneous phase along a time slice”. With reference to the top dipping reflector in Figure 3, the method allows generating converting the brown phase segment to the dipping blue segment (and similarly the yellow phase segment to the dipping green segment for bottom dipping event).
Figure 3
The practice – Petrel
Let’s see how we can create a terrain display similar to that in Figure 1 using Petrel.
Raw data
The process starts with migrated seismic data, from which we need generate both the phase and frequency component to get us the instantaneous wavelength.
For this tutorial I use a public seismic dataset (BPA9901) available on the Norwegian Public Data Portal. In Figure 4 below I am showing an amplitude time slice (above the Chalk) from the migrated seismic volume.
Figure 4
Step 1 – generate phase component
The first step is to generate an instantaneous phase attribute volume. This is found in the volume attributes. In Figure 5 below I am showing the instantaneous phase slice corresponding to the amplitude time slice of Figure 4.
*** N.B. *** If significant regional dips are observed in the seismic data, care should be takenin some cases it may be beneficial (please see comment section) to remove them through flattening prior to the terrain generation.
Figure 5
Step 2 – generate frequency component
This is the trickiest part. In theory to get the instantaneous wavelength we would have to calculate the instantaneous frequency and divide the instantaneous frequency attribute can be very noisy and can have spurious values in areas of low amplitude in the input data. A good practical alternative is to measure a single value of the dominant wavelet period T in an area of relatively flat reflections near the zone of interest as I am showing in Figure 6.
For the more avid readers, this is all explained quite nicely in Beyer (quoted from [1]): “Complex trace relationships dictate that the wavelength is the phase component divided by the frequency component. Thus one may be compelled to derive the seismic terrain by dividing the extracted instantaneous phase by the extracted instantaneous frequency (carefully applying unit conversion of 1000 ms/ 360 deg or 2.78). However extracted instantaneous frequency tends to include spurious values in low amplitudes (approaching infinity according to literature and practice which correspond to poor data quality zones. Instantaneous frequency or even averaged instantaneous frequency renders the seismic terrain noisy, unrealistic, and misleading. Years of extensive use have shown that single value of visually estimated dominant wavelet period (i.e. cycles per second) produces a very high-quality seismic terrain that closely fits the seismic events over wide areas”.
Figure 6
Step 3 – generate the instantaneous wavelength (seismic terrain)
Having estimated the dominant wavelet period T (in ms) , I can now use it to generate the instantaneous wavelength. We are essentially converting the data from the range [-180 180] deg to the range [-T/2 T/2] ms.
In Petrel I do it in the calculator with a formula of the type:
terrain=(((instantaneous phase +180)*T/2)/180)
The actual formula used is shown on the top row of Figure 7 below. You will notice that it isn’t exactly the same as the above formula. I added 1 to 180 to avoid division of zero values, e.g.:
Once the division is performed I subtract T/2 again.
Notice from Figure 7 that because we added 181 but divided by 180 there is a small adjustment to be made by hand. I get this small adjustment by double clicking on the output volume to get the statistics. In this case it is +-0.16 ms, so I run a second time the formula (bottom row, Figure 7), this time subtracting T/2 +0.16 instead of just T/2.
Figure 7
Step 4 – display seismic terrain.
There are two options in Petrel to display the resulting seismic terrain volume:
Option 1 – display bump mapped terrain slices in 2D or 3D window
This is my preferred option for scanning up and down through the terrain slices. The bump mapping effect is done by double clicking on the terrain survey with a 2D or 3D window open and selected, in the Style tab>Intersection tab. In Figure 8 I am showing the bump mapped terrain slice corresponding to the instantaneous phase time slice of Figure 5.
Figure 8
Option 2 – display selected horizons of interest in 3D window
One may want to create a display such as the one in Figure 1, which for me is intended for a later stage, when integrating perhaps with extracted amplitude or attribute anomalies highlighting hydrocarbon presence.
As often in Petrel there are different ways of achieving the same result. This is how I do it. First, I create a flat surface, with a TWT value corresponding to the slice I am interested in (as in Figure 9, left panel). Then I extract and append to this surface the terrain values from that slice of interest (as in Figure 9, right panel).
Figure 9
Figure 10
Finally, in the calculations tab, I add a constant time shift corresponding to the time associated with the slice of interest: notice the difference in Z value between the left panel in Figure 10 (before the calculation), and the right panel (after the calculation). It is also necessary to use the extracted value as visual vertical position as illustrated in Figure 11.
Figure 11
I am showing the result in Figure 12. This is the same terrain slice as in Figure 8.
Figure 12
Discussion
As a quick QC I am displaying in Figure 13 a vertical section (corresponding to the thick black line in Figure 12) from the input seismic data, with the extracted surface drawn as a thin black line.
The terrain deteriorates to the far left as we approach the edge of the survey, with fold decreasing and noise increasing, and there is a cycle skip towards the far right. But all in all I think this is a very good result: it captures the faults well, and the whole process took less than 20 minutes with no picking.
Figure 13
Limitations
This method has one limitation: the maximum fault throws or stratigraphic relief (in milliseconds) that can be mapped is equal to the period T.
Acknowledgements
I wish to thank DONG Energy for agreeing to the publication of the seismic images, which were generated using company licensed Petrel.
** UPDATE **
A few readers asked clarifications on what the benefits and potential uses are of using this attribute. The short answer is that this is in fact a pseudo-horizon that tracks dipping seismic events accurately within the range of the period of the dominant frequency period (as seen in Figure 13), which makes it an excellent reconnaissance tool. A good quality first pass map can be made in minutes in areas where detailed mapping can take days. An excellent example is Figure 16 in the original paper [1]. More details can be found in the last two paragraphs of the paper: Reservoir-scale structural data from seismic terrain and Fast 3-D screening.
In my last post I introduced a CIE Lab linear L* rainbow palette from a paper by Kindlmann et al. [1]. I used this palette with a map of South America created with data from the Global Land One-km Base Elevation Project at the National Geophysical Data Center. The map is the third one in the figure below.
Based on visual inspection I argued that linear L* colored map compares more favourably with the grayscale – my perceptual benchmark – on the right – than the first and second, which use my ROYGBIV rainbow palette (from this post) and a classic rainbow palette, respectively. I noted that looking at the intensity of the colorbars may help in the assessment: the third and fourth colorbars are very similar and both look perceptually linear, whereas the first and second do not.
So it seems that among the three color palettes the third ones is the best, but…..
… prove it!
All the above is fine and reasonable, and yet it is still very much subjective. How can I prove it, convince myself this is indeed the case?
Well, of course one way is to use my L* profile and Great Pyramid tests with Matlab code from the first post of this series. Look at the two figures below: comparison of the lightness L* plots clearly shows the linear L* palette is far more perceptual than the ROYGBIV.
One disadvantage of this method is that you have to use Matlab, which is neither free nor cheap, and have to be comfortable with some code and ASCII file manipulation.
Just recently I had an idea for an open source alternative with ImageJ and the 3D color inspector plugin. The only preparatory step required is to save a palette colorbar as a raster image. Then open the image in ImageJ, run the plugin and display the colorbar in Lab space in a 3D view. There are many options to change the scale of the plot, the perspective, and how the colors are displayed (e.g. frequency weighted, median cut, etcetera). The view can be rotated manually, and also automatically. Below I am showing the rotating animations for the same two palettes.
Discussion
The whole process, including the recording of the animations using the Quicktime screencast feature, took me less than 10 minutes, and it leaves no doubt as to which one is the best color palette. Let me know what you think.
A few observations: in 3D the ROYGBIV palette is even more strikingly and obviously non-monotonic. The lightness gradient varies in magnitude, resulting in non-uniform contrast. Compare for example the portion between blue and green to that between green and yellow: these have approximately the same number of samples but very different change in lightness value between the extremes. The gradient sign also changes, producing perceptual inversions, for example with the yellow to red section following the blue to yellow. These inversions may result in perceived elevation inversions, for example, if using this palette to display elevation data. On the other hand, the linear L* palette nicely spirals upwards with L* changing monotonically from 0 to 100.
In a previous post I used an x-ray of my left hand to showcase some basic image visualization techniques in Matlab.
If you are interested in learning image processing and analysis on your own (just like I did) but are not too interested in the programming side of things or would rather find a noncommercial alternative I’d recommend ImageJ. I just stumbled into it a few weeks ago and was immediately drawn to it.
ImageJ is a completely free, open source, Java-based image processing environment. It allows users to display, edit, analyze, process, and filter images, and its capabilities are greatly increased by hundreds of plugins on the official webpage and elsewhere.
It is used extensively by biomedical and medical image processing professionals (check this fantastic tutorial by the Montpellier RIO imaging lab), but is popular in many fields, from A-stronomy (you can read a brief review in here) to Z-oology (check this site).
I decided to give it a try right away. Within an hour of installing it on my iMac I had added the Interactive 3D SurfacePlot plugin, loaded the hand x-ray image, displayed it and adjusted the z scale, smoothing, lighting, and intensity thresholds to what (preliminarily) seemed optimal.
For each discrete adjustment I saved a screen capture, then I reimported as an image sequence in ImageJ and easily saved the sequence as an AVI movie, which is here below. I’m hoping this will give you a sense of how I iteratively converged to a good result.