Do you think either of them is ‘better’? If yes, can you explain why? If you are unsure and you want to learn how to answer such questions using perceptual principles and open source Python code, you can read my tutorial Evaluate and compare colormaps (Niccoli, 2014), one of the awesome Geophysical Tutorials from The Leading Edge. In the process you will learn many things, including how to calculate an RGB colormap’s intensity using a simple formula:
import numpy as np
ntnst = 0.2989 * rgb[:,0] + 0.5870 * rgb[:,1] + 0.1140 * rgb[:,2] # get the intensity
intensity = np.rint(ntnst) # rounds up to nearest integer
…and how to display the colormap as a colorbar with an overlay plot of the intensity as in Figure 2.
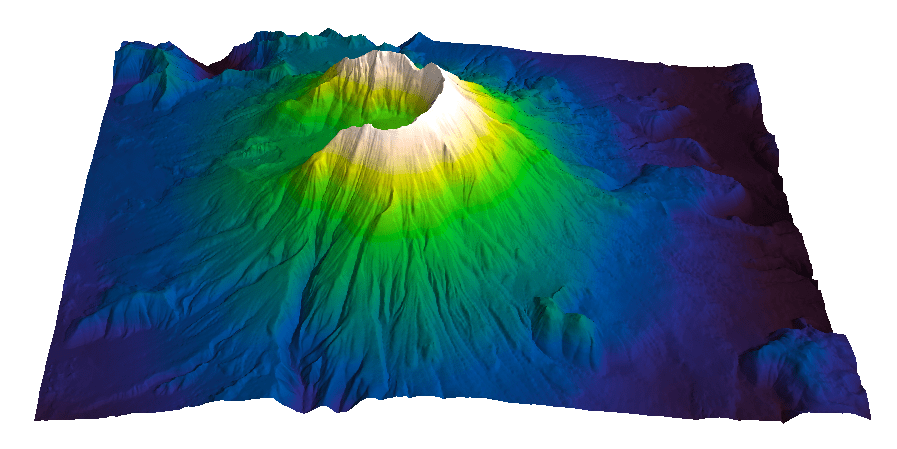
Evan Bianco of Agile Geoscience wrote a wonderful post on how to use python to import, manipulate, and display digital elevation data for Mt St Helens before and after the infamous 1980 eruption. He also calculated the difference between the two surfaces to calculate the volume that was lost because of the eruption to further showcase Python’s capabilities. I encourage readers to go through the extended version of the exercise by downloading his iPython Notebook and the two data files here and here.
I particularly like Evan’s final visualization (consisting of stacked before eruption, difference, and after eruption surfaces) which he created in Mayavi, a 3D data visualization module for Python. So much so that I am going to piggy back on his work, and show how to import a custom palette in Mayavi, and use it to color one of the surfaces.
Python Code
This first code block imports the linear Lightness palette. Please refer to my last post for instructions on where to download the file from.
import numpy as np
# load 256 RGB triplets in 0-1 range:
LinL = np.loadtxt('Linear_L_0-1.txt')
# create r, g, and b 1D arrays:
r=LinL[:,0]
g=LinL[:,1]
b=LinL[:,2]
# create R,G,B, and ALPHA 256*4 array in 0-255 range:
r255=np.array([floor(255*x) for x in r],dtype=np.int)
g255=np.array([floor(255*x) for x in g],dtype=np.int)
b255=np.array([floor(255*x) for x in b],dtype=np.int)
a255=np.ones((256), dtype=np.int); a255 *= 255;
RGBA255=zip(r255,g255,b255,a255)
This code block imports the palette into Mayavi and uses it to color the Mt St Helens after the eruption surface. You will need to have run part of Evan’s code to get the data.
from mayavi import mlab
# create a figure with white background
mlab.figure(bgcolor=(1, 1, 1))
# create surface and passes it to variable surf
surf=mlab.surf(after, warp_scale=0.2)
# import palette
surf.module_manager.scalar_lut_manager.lut.table = RGBA255
# push updates to the figure
mlab.draw()
mlab.show()
You can use the code snippets in here or download the iPython notebook from here (*** please see update ***). You will need NumPy in addition to Matplotlib.
*** UPDATE ***
Fellow Pythonista Matt Hall of Agile Geoscience extended this work – see comment below to include more flexible import of the data and formatting routines, and code to reverse the colormap. Please use Matt’s expanded iPython notebook.
Preliminaries
First of all, get the color palettes in plain ASCII format rom this page. Download the .odt file for the RGB range 0-1 colors, change the file extension to .zip, and unzip it. Next, open the file Linear_L_0-1, which contains comma separated values, replace commas with tabs, and save as .txt file. That’s it, the rest is in Python.
Code snippets – importing data
Let’s bring in numpy and matplotlib:
%pylab inline
import numpy as np
%matplotlib inline
import matplotlib.pyplot as plt
Now we load the data. We get RGB triplets from tabs delimited text file. Values are expected in the 0-1 range, not 0-255 range.
which is the format required to make the colormap using matplotlib.colors. Here’s the code:
b3=LinL[:,2] # value of blue at sample n
b2=LinL[:,2] # value of blue at sample n
b1=linspace(0,1,len(b2)) # position of sample n - ranges from 0 to 1
# setting up columns for list
g3=LinL[:,1]
g2=LinL[:,1]
g1=linspace(0,1,len(g2))
r3=LinL[:,0]
r2=LinL[:,0]
r1=linspace(0,1,len(r2))
# creating list
R=zip(r1,r2,r3)
G=zip(g1,g2,g3)
B=zip(b1,b2,b3)
# transposing list
RGB=zip(R,G,B)
rgb=zip(*RGB)
# print rgb
# creating dictionary
k=['red', 'green', 'blue']
LinearL=dict(zip(k,rgb)) # makes a dictionary from 2 lists
which gives you this result: Notice that if the original file hadn’t had 256 samples, and you wanted a 256 sample color palette, you’d use the line below instead:
In my essay I started with the analysis of the spectrum color palette, the default in some seismic interpretation softwares, using my Lightness L* profile plot and Great Pyramid of Giza test surface (see this post for background on the tests and to download the Matlab code). The profile and the pyramid are shown in the top left image and top right image in Figure 1, from the essay.
Figure 1
In the plot the value of L* varies with the color of each sample in the spectrum, and the line is colored accordingly. This erratic profile highlights several issues with spectrum: firstly, the change in lightness is not monotonic. For example it increases from black (L*=0) to magenta [M] then drops from magenta to blue [B], then increases again and so on. This is troublesome if spectrum is used to map elevation because it will interfere with the correct perception of relief, particularly if shading is added. Additionally, the curve gradient changes many times, indicating a nonuniform perceptual distance between samples. There are also plateaus of nearly flat L*, creating bands of constant color (a small one at the blue, and a large one at the green [G]).
The Great Pyramid has monotonically increasing elevation (in feet – easier to code) so there should be no discontinuities in the surface if the color palette is perceptual. However, clearly using the spectrum we have introduced many artificial discontinuities that are not present in the data. For the bottom row in FIgure 1 I used my new color palette, which has a nice, monotonic, compressive Lightness profile (bottom left). Using this palette the pyramid surface (bottom right) is smoothly colored, without any perceptual artifact.
This is how I created the palette: I started with RGB triplets for magenta, blue, cyan, green, and yellow (no red), which I converted to L*a*b* triplets using Colorspace transformations, a Matlab function available on the Matlab File Exchange. I modified the new L* values by fitting them to an approximately cube law L* function (this is consistent with Stevens’ power law of perception), and adjusted a* and b* values using Lab charts like the one in Figure 2 (from CIELab Color Space by Gernot Hoffmann, Department of Mechanical Engineering, University of Emden) to get 5 colors moving up the L* axis along an imaginary spiral (I actually used tracing paper). Then I interpolated to 256 samples using the same ~cube law, and finally reconverted to RGB [1].
Figure 2
There was quite a bit of trial and error involved, but I am very happy with the results. In the animations below I compare the spectrum and the new palette, which I call cubeYF, as seen in CIELab color space. I generated these animations with the method described in this post, using the 3D color inspector plugin in ImageJ:
I also added Matlab’s default Jet rainbow – a reminder that defaults may be a necessity, but in many instances not the ideal choice:
OK, the new palette looks promising, insofar as modelling is concerned. But how would it fare using some real data? To answer this question I used a residual gravity map from my unpublished thesis in Geology at the University of Rome. I introduced this map and discussed the geological context and objectives of the geophysical study in a previous post, so please refer to that if you are curious about it. In this post I will go straight to the comparison of the color palettes; if you are unfamiliar with gravity data, try to imagine negative residuals as elevation below sea level, and positive residuals as elevation above seal level – you won’t miss out on anything.
In Figures 3 to 6 I colored the data using the above three color palettes, and grayscale as benchmark. I generated these figures using Matlab code I shared in my post Visualization tips for geoscientists: Matlab, and I presented three of them (grayscale, Spectrum, and cubeYF) at the 2012 convention of the Canadian Society of Exploration Geophysicists in Calgary (the extended abstract, which I co-authored with Steve Lynch of 3rd Science, is available here).
In Figure 3, the benchmark for the following figures, I use grayscale to represent the data, assigning increasing intensity from most negative gravity residuals in black to most positive residuals in white (as labeled next to the colorbar). Then, I used terrain slope to create shading: the higher the slope, the darker the shading that is assigned, which results in a pseudo-3D display that is very effective (please refer to Visualization tips for geoscientists: Surfer, for an explanation of the method, and Visualization tips for geoscientists: Matlab for code).
Figure 3 – Grayscale benchmark
In Figure 4 I color the pseudo-3D surface with the cubeYF rainbow. Using this color palette instead of grayscale allows viewers to appreciate smaller changes, more quickly assess differences, or conversely identify areas of similar anomaly, while at the same time preserving the peudo-3D effect. Now compare Figure 4 with Figure 5, where we use the spectrum to color the surface: this palette introduces several artefacts (sharp edges and bands of constant hue) which confuse the display and interfere with the perception of pseudo-relief, all but eliminating the effect. For Figure 6 I used Matlab’s default Jet color palette, which is better that the spectrum, and yet the relief effect is somewhat lost (due mainly to a sharp yellow edge and cyan band).
Figure 4 – cube YF rainbow
Figure 5 – Industry spectrum
Figure 6 – Matlab Jet
It looks like both spectrum and jet are poor choices when used for color representation of a surface, with the new color palette a far superior alternative. In the CSEG convention paper mentioned above (available here) Steve and I went further by showing that the spectrum not only has these perceptual artifacts and edges, but it is also very confusing for viewers with deficient color vision, a condition that occurs in about 8% of Caucasian males. We did that using computer software [2] to simulate how viewers with two types of deficient color vision, Deuteranopia and Tritanopia, would see the two colored surfaces, and we compare the results. In other words, we are now able to see the images as they would see them. Please refer to the paper for a full discussion on these simulation.
In here, I show in Figures 7 to 9 the Deuteranope simulations for cubeYF, spectrum, and jet, respectively. In all three simulations the hue discrimination has decreased, but while the spectrum and jet are now even more confusing, the cubeYF has preserved the relief effect.
Deuteranope Simulation of cube YF
Deuteranope Simulation of Industry spectrum
Deuteranope Simulation of Matlab Jet
That’s it for today. In my next post, to be published very shortly, you will get the palette, and a lot more.
[1] An alternative to the method I used would be to start directly in CIELab color space, and use a some kind of spiral *L lightness profile programmatically. For example:
– Using 3D helical curves from: http://www.mathworks.com/matlabcentral/fileexchange/25177-3d-curves
– Using Archimedes spiral
– Expanding on code by Steve Eddins at Mathworks (A path through L*a*b* color space) in this article , one could create a spiral cube lightness with something like:
%% this creates best-fit pure power law function
% Inspired by wikipedia - http://en.wikipedia.org/wiki/Lightness
l2=linspace(1,power(100,0.42),256);
L2=(power(l2,1/0.42))';
%% this makes cielab real cube function spiral
radius = 50;
theta = linspace(0.6*pi, 2*pi, 256).';
a = radius * sin(theta); b = radius * cos(theta);
Lab1 = [L2, a, b]; RGB_realcube=colorspace('RGB<-Lab',(Lab1));
[2] The simulations are created using ImageJ, an open source image manipulation program, and the Vischeck plug-in. I later discovered Dichromacy, anther ImageJ plug-in for these simulations, which has the advantage of being an open source plugin. They can also be performed on the fly (no upload needed) using the online tool Color Oracle.
In my last post I introduced a CIE Lab linear L* rainbow palette from a paper by Kindlmann et al. [1]. I used this palette with a map of South America created with data from the Global Land One-km Base Elevation Project at the National Geophysical Data Center. The map is the third one in the figure below.
Based on visual inspection I argued that linear L* colored map compares more favourably with the grayscale – my perceptual benchmark – on the right – than the first and second, which use my ROYGBIV rainbow palette (from this post) and a classic rainbow palette, respectively. I noted that looking at the intensity of the colorbars may help in the assessment: the third and fourth colorbars are very similar and both look perceptually linear, whereas the first and second do not.
So it seems that among the three color palettes the third ones is the best, but…..
… prove it!
All the above is fine and reasonable, and yet it is still very much subjective. How can I prove it, convince myself this is indeed the case?
Well, of course one way is to use my L* profile and Great Pyramid tests with Matlab code from the first post of this series. Look at the two figures below: comparison of the lightness L* plots clearly shows the linear L* palette is far more perceptual than the ROYGBIV.
One disadvantage of this method is that you have to use Matlab, which is neither free nor cheap, and have to be comfortable with some code and ASCII file manipulation.
Just recently I had an idea for an open source alternative with ImageJ and the 3D color inspector plugin. The only preparatory step required is to save a palette colorbar as a raster image. Then open the image in ImageJ, run the plugin and display the colorbar in Lab space in a 3D view. There are many options to change the scale of the plot, the perspective, and how the colors are displayed (e.g. frequency weighted, median cut, etcetera). The view can be rotated manually, and also automatically. Below I am showing the rotating animations for the same two palettes.
Discussion
The whole process, including the recording of the animations using the Quicktime screencast feature, took me less than 10 minutes, and it leaves no doubt as to which one is the best color palette. Let me know what you think.
A few observations: in 3D the ROYGBIV palette is even more strikingly and obviously non-monotonic. The lightness gradient varies in magnitude, resulting in non-uniform contrast. Compare for example the portion between blue and green to that between green and yellow: these have approximately the same number of samples but very different change in lightness value between the extremes. The gradient sign also changes, producing perceptual inversions, for example with the yellow to red section following the blue to yellow. These inversions may result in perceived elevation inversions, for example, if using this palette to display elevation data. On the other hand, the linear L* palette nicely spirals upwards with L* changing monotonically from 0 to 100.
Matt Hall and Evan Bianco of Agile Geoscience have put together this great new book. I have been fortunate to have my article on colourmaps included as one of the 52 essays in the book. You can order the book directly from Agile’s publishing company Agile Libre:
or you can order it on Amazon. For a look inside it, check here!